
Finger exercisers/grips are commonly used for physical therapy to strengthen a stroke patient’s fine motor control.
Typically, these grips have assigned levels of resistance. Currently, medical professionals and physical therapists have to manually count the number of repetitions a patient has done and take note of which resistance level the patient can do. The physicians are unable to calculate the exact force applied to determine the grip strength of the patient.
We aim to create a device for the quantification of a hand grip with finger exercisers which detects how much force a patient is able to apply using the fine motor function of their fingers.
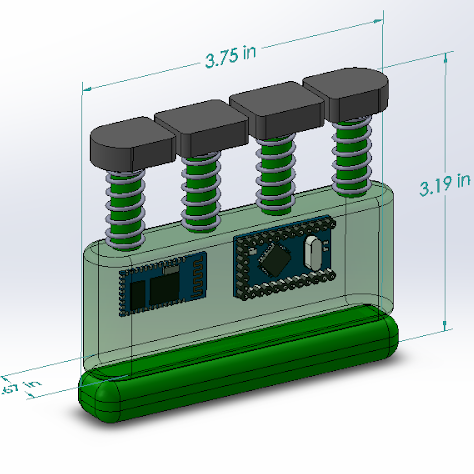
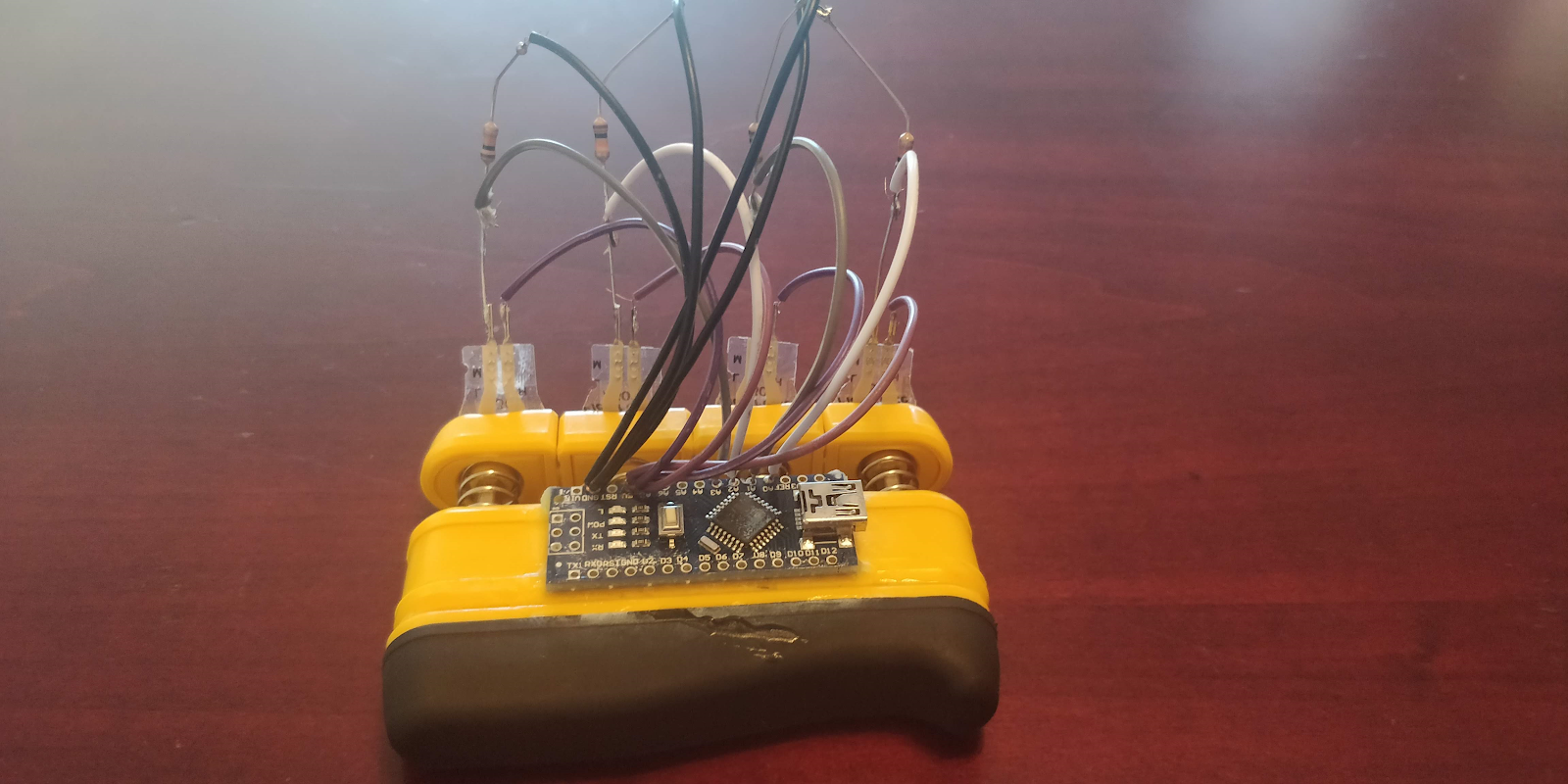
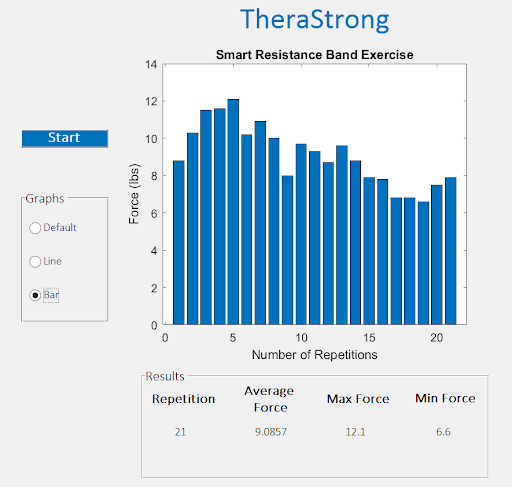
Our device is shown above as both a CAD model and our first generation prototype. We used an ordinary finger exerciser and added smart features such as force sensors and an arduino to transmit the data. This is encased in a 3D printed housing. This device will be able to indicate how many repetitions the patient can do and indicate the specific force the patient can apply with their fingers. These measurements will also be displayed through an app as shown above labeled "user interface".The goal of this device is to help physicians easily visualize a patient’s rehabilitation.